

 جلسه دفاع پایان نامه: فرهود طاهریان، گروه مهندسی ساخت و تولید
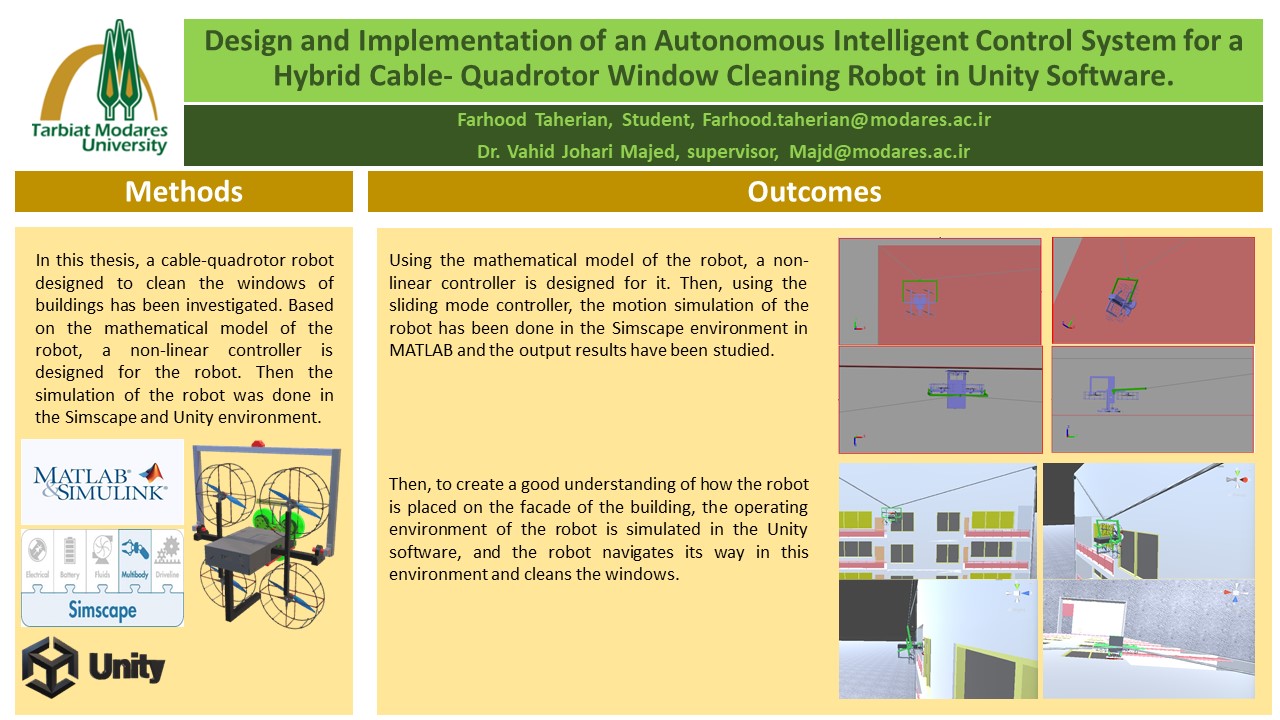
ارائهکننده : فرهود طاهریان چکیده: در این پژوهش، به مدلسازی، کنترل و شبیهسازی یک ربات کابلی-چهارپره پرداخته شده است. یکی از کاربردهای این ربات نظافت شیشههای ساختمانهای بلند میباشد. در ابتدا مدلسازی ربات با روش نیوتون-اویلر صورت گرفته است. سپس، طراحی کنترلر برای ربات با توجه به ساختار ربات مورد بررسی قرار گرفته است. برای هوشمندسازی ربات، به طراحی کنترلر پسخوراند خطیساز و کنترل کننده مود لغزشی پرداخته شده است و بهینهسازی پارامترهای کنترلی نیز با الگوریتم فراابتکاری بهینهسازی ازدحام ذرات صورت گرفته است تا نتایج خروجی از کنترلر مورد بررسی قرار گیرد. همچنین، شبیهسازی ربات در محیط سیماسکیپ به صورت مدل دینامیکی انجام شده و کنترل کننده مود لغزشی بر آن اعمال گریده است تا عملکرد ربات ارزیابی گردد. در انتها، نمای ساختمان و مدل ربات به نرمافزار یونیتی منتقل شده است و یک شبیهسازی از محیط واقعی ربات ایجاد شده است تا درک بهتری از نحوه عملکرد ربات ایجاد شود. نتایج حاکی از آن است که ربات با درنظر گرفتن یک سامانه هوشمند کنترلی توانایی کنترل خودکار در محیط عملیاتی خود را دارد که این نتایج به صورت شبیهسازی نمایش داده شده است. |
