عنوان رساله: تحلیل تجربی یک پرنده بالزن به منظور طراحی مانور نشست
ارائهکننده: محمدرضا پارسا استاد راهنما: دکتر مجید محمدی مقدم، دکتر سعید کریمیان علی آبادی استاد ناظر داخلی اول: دکتر مسعود ابراهیمی کچویی استاد ناظر داخلی دوم: دکتر مجید ساده دل استاد ناظر خارجی اول: دکتر عباس ابراهیمی استاد ناظر خارجی دوم: دکتر عقیل یوسفی کما تاریخ: 1403/03/09 ساعت: 15 مکان: کلاس 154 دانشکده فنی مهندسی
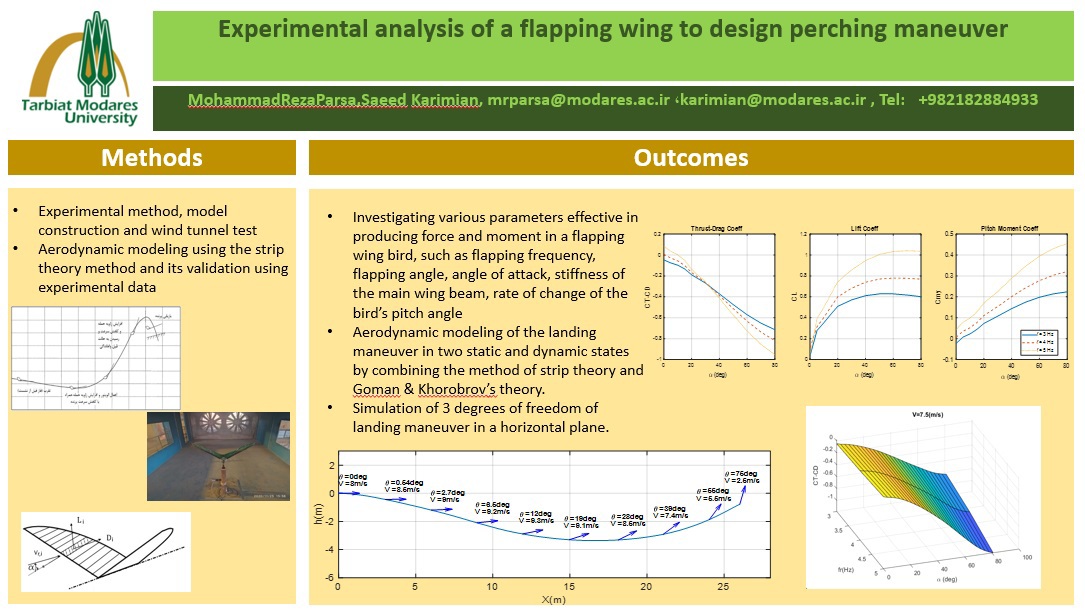
چکیده: استفاده از پرندههای بالزن به دلیل قابلیت مانور و عملکرد بالای آن در عملیات های مختلف از جمله شناسایی، مراقبت و نظارت در سال های اخیر مورد توجه قرار گرفته است. با توجه به این موضوع، بررسی بالزنها از منظرهای مختلف علمی، موضوعی جدید و جذاب برای محققان است. در این میان، یکی از مراحل چالشبرانگیز در پرواز این گونه از پهپادها مرحله نشست آنها میباشد. پرندگان طبیعی به راحتی حالت پرواز خود را از پرواز کروز به حالت نشست تبدیل میکنند. در این فرایند، سرعت پرنده به صورت ناگهانی افت کرده و در طی آن موقعیت پرنده نیز به صورت دقیق کنترل میگردد. این ویژگی این امکان را به پرنده میدهد که در سطوحی غیر از سطح زمین مثل سیم برق یا شاخهی درختان فرود بیاید. بررسی امکان پیاده سازی این مانور در پرندگان بالزن ساخته دست بشر، موضوعی نوآورانه و بدیع برای پایاننامه مقطع دکتری میباشد. تغییرات سریع سرعت و زاویهی حمله در این مانور و حرکت بالها به منظور بالزدن که باعث ایجاد آیرودینامیک پیچیده و ناپایا میگردند، از مهمترین پیچیدگیهای این مسئله میباشد. در این پژوهش سعی بر توسعهی یک مدل آیرودینامیکی برای توصیف مانور نشست به کمک دادههای استخراج شده از تونل باد، که شامل دادههای آزمونهای استاتیکی و دینامیکی بود، شد. آزمون های دینامیکی به کمک یک استند دینامیکی طراحی شده، که حرکت مانور نشست را شبیهسازی میکند، انجام گرفته است. از مهمترین پارامترهای مورد بررسی،زاویهی حمله، نرخ تغییرات زاویهی حمله و فرکانس بالزدن را میتوان عنوان کرد. مدل پیشنهادی توسعه یافته برای این منظور، ترکیبی از نظریه نواری و تئوری پیشنهادی گمان و خرابروف و اصلاح به کمک دادههای تجربی میباشد. نتایج مربوط به دادههای آزمونهای تونل باد، مدلسازی آیرودینامیکی نشست و شبیهسازی مانور فرود در متن آورده شده است.